自动泡棉切割机
标签:Arduino 电动工具 DIY
HelloPlanet 发布于 2015-04-08 15:50
![FPWS88XI800ZQ0I.LARGE[1].jpg](http://7nimage.chenmeixuan.com/Fr5YhpLPlsmX9_PaPkByOPBgIk9z.jpg_m.jpg)
为了保护国家的花朵,让懵懂的少年面对成卷的青春懂得珍惜,我们用Arduino制作了一台卷纸切割机。
“作为一位卖家,每天打包发货过程中都有许多重复劳动。切割泡棉就是其中最累的一种,切啊切,累趴下也切不完。于是我自己动手做了一台泡棉切割机,解放自己。”
原作者:
jgschmidt
原文地址:
http://www.instructables.com/id/Robot-Foam-Cutter/
关于设计…
为了简化设计,制作过程中使用了步进电机。通过固定行进的步数,就可以控制电机在指定范围内往复,省去了限位开关和长度计量电路,也简化了对应的电路设计。为了保证泡棉在推进的过程中不打滑,我们在泡棉的推送部分使用了一片牙盘。只要压力适当,推进长度就能很均匀,切割出来的形状也就十分完美。
Step 1: 备料
![6.00_inch_Aluminum_Channel__585446_[1].jpg](http://7nimage.chenmeixuan.com/FhD3LBj2FOKyHp_2A0-_TNRY7l6x.jpg_m.jpg)
![F1QNSK3I800ZPVT.LARGE[1].jpg](http://7nimage.chenmeixuan.com/Fux-h2ce742SI82YWEu_vvDyYMDR.jpg_m.jpg)
- 复合板 3/4英寸 x 15英寸 x 18英寸 (约2cm x 38cm x 45cm)
- #4 x 3/8英寸 (约等于M4 x 10mm,请以电机和支架的孔位为准)平头螺丝
- #6 x 3/4英寸 (约等于M6 x 20mm,请以电机和支架的孔位为准)平头螺丝
- 特氟龙片,或其他光滑材料
- 双面胶
- 大号十字螺丝刀
- 内六角扳手
- 长镊子
- 1.5mm钻头
- 万能胶
平头自攻钉
扁头螺丝(要与你的轨道和步进电机配套)
- Arduino Nano
- 2片步进电机驱动板
- 面包板和跳线
- DC12V 1.5A电源
- 2.1mm 电源插座(和电源配套)
- 3个按钮微动开关
- 2个1.5A14步步进电机
- 绝缘套管
- 热缩管
- (编者:这些器件的原始型号在国内不一定能买到,可以用步进电机滑轨、支架等代替)
- 轨道,
- 拐角支架,
- 步进电机齿轮(带动皮带的一个,皮带对端从动轮一个,推送泡棉用的两个),传动杆,
- 皮带,皮带夹具,皮带用滑轨,滑块,刀片夹具,轨道固定件。
Step 2: 准备基板
这块基板原本是一块桌板,2cm纤维板和0.6cm的橡木复合而成。
选材的时候需要注意尺寸是否足够,以及基板是否有足够自重保证机器运行时的稳定。
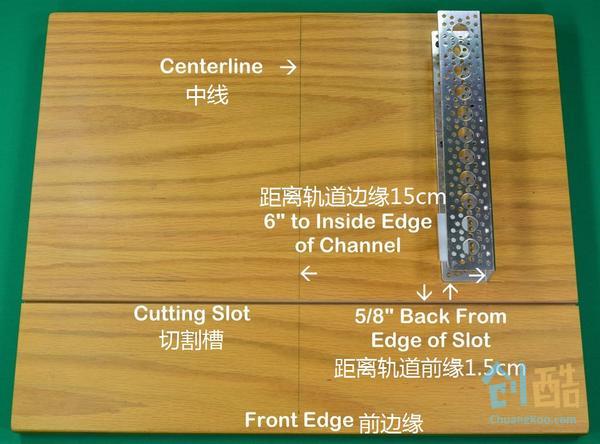
我的基板大小是45x38cm,我把长边作为前边,并且用锯床推出了一条切割槽。
刀片深入切割槽推送,可以更好地保证切割的效果。如果你没有条件开槽,可以考虑垫高切割处的两侧。
我把一条较短的的轨道与基板的中线平行排列,距离大概15cm,你可以根据你的需要确定宽度,并把它用自攻钉固定在基板上。
固定之前可以用1.5mm的钻头给自攻钉开好孔。
轨道与基板的切割槽之间预留了1.5cm的空间,以便稍后刀头组件和铝制导轨能够顺利装入。
Step 3: 放置第二条轨道
![FDZ8EQ9I800ZPOP.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FpvSE0KfpT0MdgZEFqoqI8JCAKff.jpg_m.jpg)
![F98ZKPDI800ZPNL.LARGE[1].jpg](http://7nimage.chenmeixuan.com/Fp6tT5BIl9Vg6NcMv8YG-xBqRpFy.jpg_m.jpg)
![FF5HNHGI800ZPNK.LARGE[1].jpg](http://7nimage.chenmeixuan.com/Fl5sXqGx8QiUCr6--otmNMW2Dt2y.jpg_m.jpg)
准备好第二条较短的进料轨道,与中线平行放置在左侧,和之前的轨道距离大概30cm,略宽于我所用的泡棉。
把你手里的长轨道放在上面,垫好6mm垫片,并且用螺丝紧固这两条轨道。参考图上白色圈中标记出的螺丝位。
按照手头泡棉的宽度,我在长轨道的右侧对出一个宽度合适的孔位,并且用垫片固定位置(如图中红圈和绿圈所示)。
这个步骤红色圈里的螺钉是从上向下穿过的,绿色的则需要用内六角从下向上固定。
你可能已经注意到了,红绿圈的位置很奇怪,这是因为我手头的泡棉宽度不太一致,需要有一些活动余地,保证泡棉的两侧都在轨道内齿轮能压到的地方。
用三角板检查,确保两条短轨道相互平行,间距31cm(请以你手头的泡棉尺寸而定),距离切割槽1.5cm,位置确定后,打孔并固定左侧的短轨道。
固定完成后,摘掉长轨道。
Step 4: 送料机构
![FL8H3EZI800ZPM1.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FviUeNM3GRBGyLVeph0Wc5mEI6B1.jpg_m.jpg)
![FZM6YW2I800ZPLZ.LARGE[1].jpg](http://7nimage.chenmeixuan.com/Fg53M-9BkyI3zC5cioJNvxGxoHy0.jpg_m.jpg)
![F4FZESII800ZPLL.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FhD3GZ8z_BCPcRJ56kvHyA_O0KQF.jpg_m.jpg)
如图所示,送料机构由齿轮、台阶、传动轴、轴承和步进电机组成。
在齿轮下方,我贴上了一些特氟龙胶带,齿轮的齿会轻轻压入泡棉,推动泡棉流畅滑出。
而后,将步进电机安上轴套和传动轴,并固定在两侧的轨道上。步骤可以参考第二张图片。
把齿轮和齿轮用的轴套套上传动轴,对好位置并固定齿轮轴套。安装的位置可以参考第二张图片。
参考第三张图片,组装剩余的部件。我在左侧安装了一个轴套,以便手动转动转轴。
Step 5: 滑动刀架
![FI90OOKI800ZPKF.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FsJTSy0amG8aW6oHdXFGxthkh-P5.jpg_m.jpg)
![FVMQI81I800ZPXD.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FjgB7dXQRPc4RjvMK514u3nECKE9.jpg_m.jpg)
我们的长轨道在这时就变身成滑轨,引导刀架自由地穿梭啦!
参考第一张图片,用C字型的框架和连接块,组成刀架的基本结构。
之后,用一个直片组件做出刀架的基本形状(如第一张图黑色描边的螺丝孔所示)。
刀架组装好之后,按照第三步定好的位置组装横向的长轨道。第二张图片中红圈的那个垫片,上下各固定了一个螺丝,所以可以前后微调。
按照第二张图片中的样子前后微调刀架的位置,保证刀架能够与切割槽平行滑动后,上紧长轨道。
轨道紧固之后,再次测试滑动刀架,检查框架是否因为紧固螺丝的力道偏移。
如果刀架在轨道上滑动不畅,你可能需要手动掰一掰长轨道的开口。
Step 6: 传动皮带从动轮
![FMU8PE1I800ZPXC.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FqkY7h6-Z-I44S4EXCuzczrj18sQ.jpg_m.jpg)
![F1GADKPI800ZPX9.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FtznznIsWzbfHRWfsIyiPVWYSJll.jpg_m.jpg)
这一步比较简单,按照第二张图片组装起来即可。
Step 7: 组装传动皮带
![FALDZMGI81GJ2S1.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FnsXl1bSdk2-2hkqFjZ72AVcUPIK.jpg_m.jpg)
![FO1H7VCI800ZPWX.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FpUckhoVd2m_q8kzQ5tF5vsAWLnd.jpg_m.jpg)
Step 8: 安装切割电机
![FSRVXBHI81GJ2R9.LARGE[1].jpg](http://7nimage.chenmeixuan.com/Fic2F3agmGTb1svPfn42Iprv2LwE.jpg_m.jpg)
![F9BDG6QI800ZPUB.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FqDrXqOOfOMs-ZJjpHgexkxFYCV3.jpg_m.jpg)
![F4JWCN2I800ZPSU.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FtkTC8W1jvB8sE1gbOBfaPZFriCP.jpg_m.jpg)
![FHC2P37I800ZPRQ.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FvHpl1c3d4o2CRMRsgUAGLSiLbG9.jpg_m.jpg)
于是我找了垫片把电机垫得靠外一点来解决这个问题,如第三张图所示。
组装这个部分的时候,注意要用低帽螺丝,避免齿轮、轴套和螺丝接触。
组装完毕的样子如第四张图所示。
Step 9: 紧固皮带
![FJ2N4BFI800ZPQM.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FsKSe_pXQKJ4K1nZGBaFx5cpg7JI.jpg_m.jpg)
![FRSUDQWI800ZPQ8.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FoFWigBHJNk0pWnCnj8FuLd5sBcU.jpg_m.jpg)
两头的夹具和齿轮都安装好之后,就可以把皮带上紧了。
因为刀口的行程比泡棉的宽度要大,所以在精度上没有特殊的要求,只要把皮带绷紧,避免跳齿就可以了。
上紧的时候,如图中黄色圈出部分所示,先绷紧皮带,然后一只手抓紧皮带,另一只手把螺丝上紧,夹具的螺丝要轮着上紧,避免因为皮带的张力造成夹具偏移。
之后,把刀架的其余部分固定在皮带夹具上。前后移动刀架,再次检查刀架的运动是否与切割槽平行。
Step 10: 安装刀架
![FG8CNSJI800ZRI3.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FoNJGlOvWWrn55qesKoLaItDzJmI.jpg_m.jpg)
![F5J421HI800ZRGW.LARGE[1].jpg](http://7nimage.chenmeixuan.com/Fqzu9BCJLmlwmOUU3sPfNTwItkPm.jpg_m.jpg)
准备2片模型刀片或手术刀片,用方形垫片把他们固定在刀架上。把刀架摆在轨道上比划一下,调整刀片以便它们的位置贴合切割槽。
*** 小心哦,刀片很锋利的!***
检查OK之后,把刀架固定在皮带夹具上,轻轻地推动刀架沿切割槽运动,检查刀片是否会刮到切割槽的边缘。
如果没有,这一步就大功告成了。
Step 11: 进料压片
![FD54HFFI800ZRFA.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FmzxmZc0-AriJ4I80hdxylw9y6V7.jpg_m.jpg)
![F4MXB7UI800ZRF9.LARGE[1].jpg](http://7nimage.chenmeixuan.com/Fl4Jo7qvraY_kN_3QLN78H7MMQKQ.jpg_m.jpg)
第一次送入泡棉并且滑动刀架的时候,泡棉弹来弹去的,切出来弯弯曲曲的。
于是我决定加装一个压片,解决这个问题。
我用了一条角铝,两头打孔,用自攻钉和垫片把它固定在切割槽的边缘,垫高高度刚刚够泡棉穿过就可以了。
Step 12: 控制软件和硬件
![FCO5IIUI81GJ2QD.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FnwHFen98FvSHArSAXrDwxECvYJS.jpg_m.jpg)
![F5MGYA7I81GJ2QB.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FrYAmSQurJ3hX2QGXoMcYAqPty7U.jpg_m.jpg)
12V输入从左侧接入,并联到两个步进电机控制板的VMOT。
右侧控制板的+12V是从左侧控制板下面穿过去的。
左侧控制板控制进料电机,右侧控制板控制切割电机。
左侧控制板的5V输出被接到了Arduino Nano做供电用。
两个接到控制板的10K电阻用来拉高控制板的使能脚。这样,Arduino启动的时候,电机就不会受到干扰。
不这样做的话Arduino启动的时候电机会轻微颤抖几下。
第14格的橙色线把电机打到半步步进模式,以便提高精度。
我把电机的线穿上了绝缘管,并且在两头的接线处点上了万能胶,以便增加强度。
点击下载步进电机驱动板和Arduino Nano的资料。
代码也已作为附件上传到本教程。
棕色:进料电机送入一张泡棉;
黑色:刀架往复一次;
白色:连续切割10张泡棉。
附件:
Step 13: 总结
![FYAHV4JI800ZPYW.LARGE[1].jpg](http://7nimage.chenmeixuan.com/FpVQvlS4RZKslqn869KxCh6nCPS1.jpg_m.jpg)
比如说,驱动刀架的齿轮总是要先套在电机上,但又必须先固定好电机再固定这个齿轮。
但有些步骤也是可以调整的,如果你乐意,当然可以安好刀架电机再开始穿皮带。
这一切的一切都是挑战,我总觉得步骤图够多够详细了,可是写教程的时候又捉襟见肘。
总之,相信这一切都不能阻挡你创作的脚步,加油!
作者
作者的最新作品
-
迷你CNC模型机
2015-04-09 16:01发布
-
自动泡棉切割机
2015-04-08 15:50发布
-
3D打印的太阳能小飞机
2015-04-07 16:16发布
-
萌萌哒纸杯小风车
2015-03-23 12:41发布
阅读数: 11868
